Требования
Прототип 1 представляет собой механический манипулятор установленный на гусеничном шасси. Прототип должен обеспечивать:
- при потере сигнала прототип должен возвращаться в район последнего устойчивого сигнала;
- управление по WIFI или GSM каналу с передачей видео аудио информации;
- эффект присутствия заключается в возможности передавать видео и аудио информацию от оператора устройства.
описание
Общая композиция устройства следующая. На гусеничном шасси (1) смонтирована аккумуляторная батарея 12 В (2) которая осуществляет автономное питание автоматики изделия и бортовой компьютер (7). К бортовому компьютеру подключены модули сенсоров (8) и эффекторов (6) которые образуют автоматику, экран 10.1 Дюймов TFT LCD (4), две (для стереоскопии) видеокамеры (5) и аудиосистема (9). Видеокамеры и экран размещены на подвижном манипуляторе типа DOArm. Манипулятор позволяет выполнять обзор камерами окружающей остановки, принимать аудио обстановку и предоставлять видео информацию на экране в необходимом направлении. Аудиосистема размещена на шасси, также есть на экране.
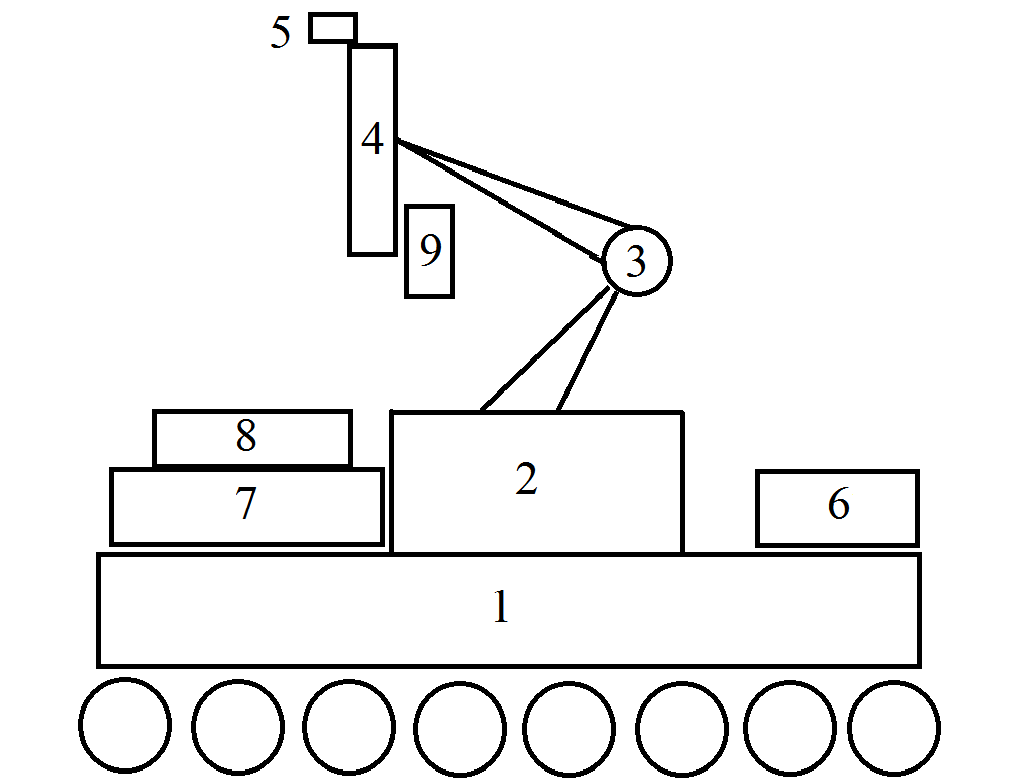
Рисунок 1 - схема устройства
Модуль сенсоров и модуль эффекторов построены на базе микроконтроллера Uno R3 CH340G/ATmega328p c шилдом Arduino sensor shield v5.0. Модуль сенсоров отличеается от модуля эффекторов прошивкой SENSOR_Module и соответствен EFFECTOR_Module.
Модуль сенсоров было бы правильно называть модуль сенсоров и телеметрии.
| Навигационный датчик положения GPS | GY-NEO6MV2 | |
| Навигационный компас | SPI/IIC MPU-9250 | |
| Уровень заряда 3 батарей | ADS1115 | |
| Сенсор акселерометр оснастки | DC-1298A | |
| Сенсор акселерометр центра масс | SPI/IIC MPU-9250 | |
Модуль эффекторов осуществляет управление манипулятором и шасси. Управление осуществляется в виде приема команд от бортового компьютера (проработать аналог G-кода назовем его RC-код)
| Команда | RC-код | Примечание |
| Правый борт вперед (время обороты или путь ????) | ||
| Правый борт назад | ||
| Левый борт вперед | ||
| Левый борт назад | ||
| Манипулятор координаты | ||
| Манипулятор вектор | ||